
A low-cost remotely operated vehicle (ROV) with an optical positioning system for under-ice measurements and sampling
New publication by Lars Chresten Lund-Hansen, Thomas Juul, Tor Dam Eskildsen, Ian Hawes, Brian Sorrell, Claus Melvad, Kasper Hancke
Abstract:
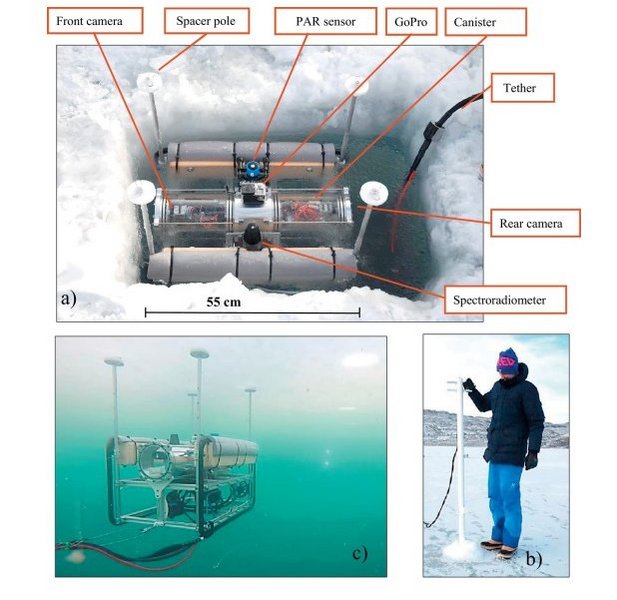
Here we describe the design, performance and field tests of a lightweight (13.1 kg), low-cost (15.000 USD), and portable remotely operated vehicle (ROV) of dimensions 55 × 43 × 34 cm (L × H × W), with a new optical based positioning system. The ROV is designed for deployments and measurements of the irradiance field at a short distance below sea ice bottom in landfast level sea ice at calm under ice conditions. It is equipped with two cameras (front and rear) for optical positioning based on reference poles with LED lights below the ice. A third upward camera is for guiding during deployment and positioning. The ROV is equipped with spacer poles to maintain a constant distance between ROV with onboard optical sensors and bottom of the ice. All pre-tests of housing, thrusters, optical positioning, and ROV maneuverability were carried out in freshwater basins prior to field trials and tests. These were conducted at Kangerlussuaq, West Greenland on landfast first-year 79–80 cm thick ice with a variable (1–12 cm) snow cover in March 2016. The ROV was easily deployed through a hole (75 × 50 cm) in the ice and easy to maneuver below the ice. Test of positioning system showed an average deviation of 28 ± 5 cm between optically based position and actual position with an average offset from center line of 16 ± 5 cm. The ROV was applied for measuring the under-ice irradiance field and results demonstrated a solid negative correlation between snow depth and PAR transmittance. We derived a Normalized Differences Index (NDI) for snow depths: NDIsnow depth = [E(610 nm) – E(490 nm)]/[E(610 nm) + E(490 nm)] with minimum attenuation at 490 nm and maximum at 610 nm. It is discussed that the correlations for both PAR transmittance and the NDI with snow depths are due to a combination of a constant distance between optical sensor and ice bottom, and accurate positioning. A test showed that the wakes of thrusters removed parts of the ice algae biomass, but the study demonstrates the applicability of this ROV design for measurements of the under-ice irradiance field below landfast sea ice with a new optical based positioning system.
Cold Regions Science and Technology, Bind 151, 07.2018, s. 148-155. doi.org/10.1016/j.coldregions.2018.03.017