
An affordable and portable autonomous surface vehicle with obstacle avoidance for coastal ocean monitoring
New publication by Daniel F.Carlson, Alexander Fürsterling, Lasse Vesterled, Mathias Skovby, Simon Sejer Pedersen, Claus Melvad, Søren Rysgaard.
Abstract
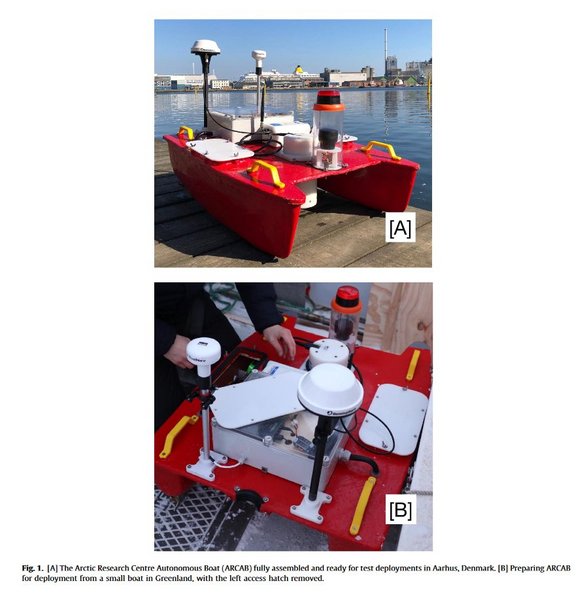
Bathymetry measurements are needed in shallow, near-shore environments to estimate the potential distribution of macroalgae and seagrass, which contribute to oceanic carbon sinks in Greenland and other Arctic locations. Additionally, ocean current observations near icebergs and marine-terminating glaciers are necessary to estimate their melt rates. Rocky coastlines, icebergs and glaciers, however, present a significant safety risk to manned vessels. We developed an affordable and portable autonomous surface vehicle (ASV) that can safely obtain bathymetry and ocean current measurements in dangerous environments. The Arctic Research Centre Autonomous Boat (ARCAB) is a student-built ASV that can be transported on a euro-pallet and operated from a small boat and from shore. ARCAB has a minimum battery life of 2 h and accommodates a SonTek M9 RiverSurveyor system for bathymetry and ocean current measurements. ARCAB is controlled by a National Instruments myRIO-1900 and features autonomous waypoint navigation, obstacle avoidance, and return-to-home functionality. We demonstrate the use of ARCAB in Greenland in January 2019.